The machining industry is under going a transformation. The computer numerical controller (CNC), long a staple for the so-called two and a half axis machining cell is inadequate in addressing current technologies such 3D Machining and Printing. This is not to mention it’s ineffectiveness when applied to 3D path planning which is a requirement for applications such as 3D scanning and articulated robot control.
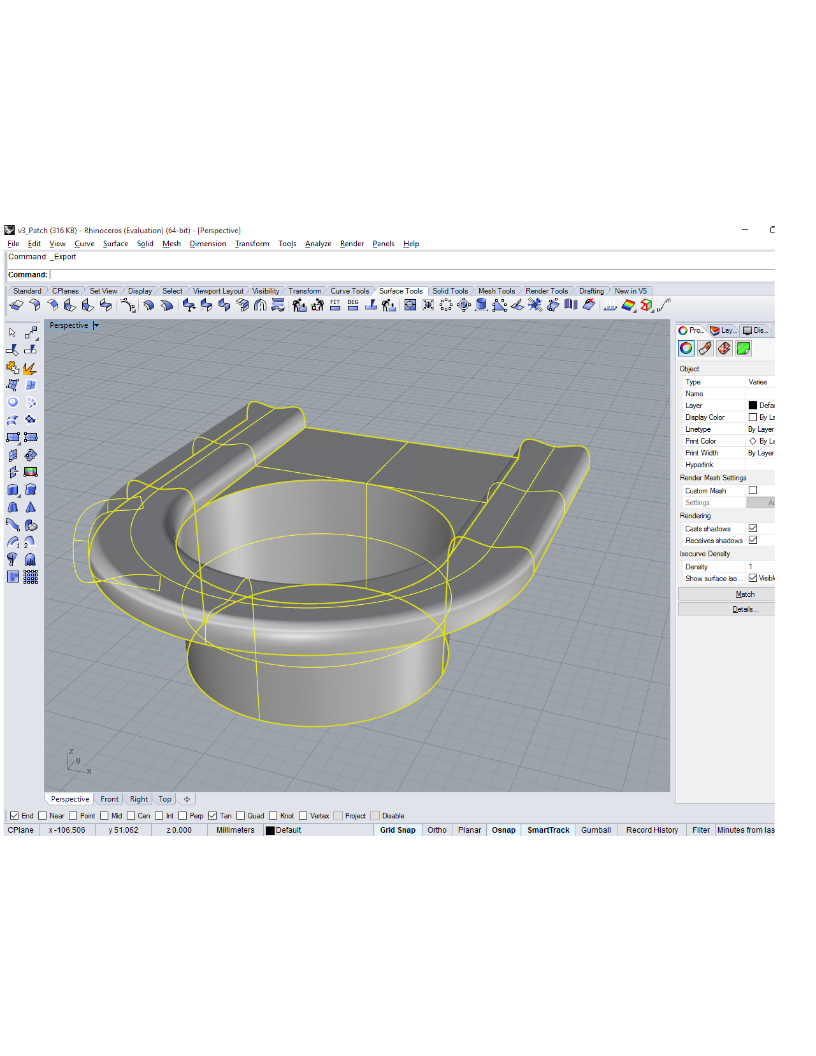
Here, I present some ideas on how 3D CAD programs such as Rhinoceros can be enhanced so as to provide a powerful framework for 3D trajectory generation.
